애매하게 알던것 공부하기
- global average pooling

- weight decay
- 1x1 convolution
- resnet
- attention
- seq2seq
- google net
- fast r-cnn
- faster r-cnn
- mask r-cnn
- yolo
- dropout
- transformer
- gru
- CAM
1x1 Convolution 이란?
convolution 의 filter 개수에 따라 ouput dimension 이 달라지지만, 각 filter 의 결과, 즉 feature map 의 가로 세로 크기는 동일한 convolution 연산이다.
사실 transpose convolution 같은 아예 연산방식이 달라지는것과는 다르게, 일반적인 convolution 과 동일한 연산을 하지만, filter 의 크기가 1x1 로 고정되어있는것이 특징이다.
1x1 filter 를 사용하기 때문에, 이미지의 공간적 정보를 feature map 에 함축적으로 담는 기존 covolution 의 역활 보다는, dimension reduction , 계산량을 줄이는 전처리 등으로 사용된다.
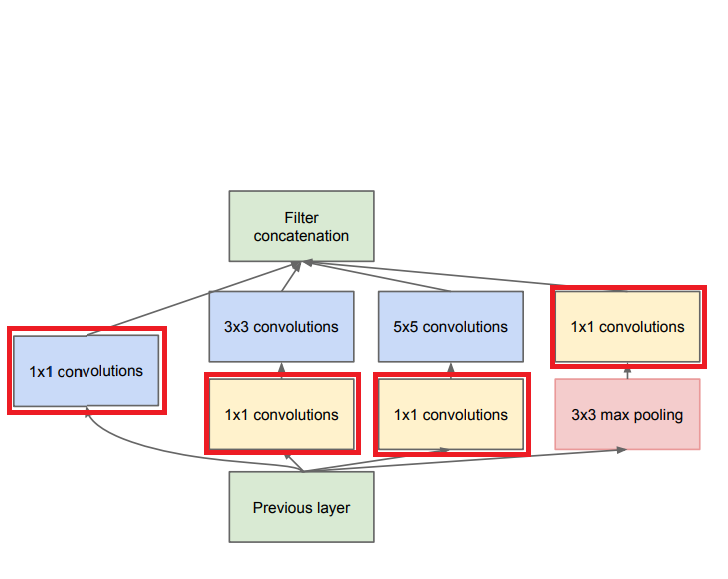
That is, 1×1 convolutions are used to compute reductions before the expensive 3×3 and 5×5 convolutions.
GoogleNet 에서는 1x1 convolution 의 역활을 2가지로 설명한다.
1 × 1 convolutions have dual purpose
- most critically, they are used mainly as dimension reduction modules to remove computational bottlenecks,
- that would otherwise limit the size of our networks.
This allows for not just increasing the depth, but also the width of our networks without significant performance penalty.
GoogleNet 에서는 inception network 를 사용하는데, 하나의 network 를 지날때마다 naive 한 inception network 의 경우 계속 크기가 커지게 된다.
network 의 depth 와 width 가 지속적으로 커지게 되는것을, 1x1 convolution 이 일종의 bottleneck layer 역활을 하여 크기를 줄여서 연산을 하고, 나중에 다시 늘어나도 같은 크기를 유지할 수 있게 해주는 역활을 하게 된다.
참고